CSA-robot zal mechanische onkruidbestrijding vereenvoudigen in biologische beddenteelt
Het Instituut voor Landbouw-,Visserij- en Voedingsonderzoek (ILVO) draagt agro-ecologie hoog in het vaandel. Onkruid mechanisch verwijderen in plaats van chemisch is één manier om milieubewust te werken. Als dat met een robot automatisch kan, en tegen een relatieve lage kost, ziet de toekomst er rooskleurig uit voor de Vlaamse biolandbouw. Het ILVO en de onderzoeksgroep AIRO van UGent-Imec slaan de handen in elkaar in het project ‘CSA-robot’, waarbij op een cocreatieve manier samen met CSA-bedrijven een multi-inzetbaar en betaalbaar robotplatform ontwikkeld wordt.

De landbouw, en zeker de kleinschalige landbouw, staan nu én in de toekomst voor heel wat uitdagingen. Op het vlak van klimaat en milieu wordt de sector onder steeds grotere druk gezet, terwijl financiële rendabiliteit van het eigen bedrijf eigenlijk op de eerste plaats moet staan. Duurzaam omgaan met je land, en inspelen op technologische smart farming innovaties zoals robots om arbeidsintensieve, repetitieve taken te automatiseren, kan deel van de oplossing zijn.
Simon Cool, coördinator van het ILVO living lab Agrifood Technology en projectleider van het CSA-robot project binnen ILVO, ziet een sterke vraag bij de kleinschalige biolandbouw: “In de gangbare landbouw kiezen landbouwers voor grotere en zwaardere machines om zo de performantie en arbeidsefficiëntie te verhogen. Kleinere biotelers, waaronder meer en meer Community Supported Agriculture (CSA) bedrijven, hebben vaak minder financiële mogelijkheden om grote investeringen te doen en bijhorende risico’s te dragen. Bovendien is bij veel teelten de vraag naar handenarbeid nog steeds groot”. Robots kunnen bepaalde arbeidsintensieve taken automatiseren, wat een aanzienlijke besparing aan personeelskost kan betekenen. Uit een rondvraag bij biologische groentetelers, blijkt dat vooral het verder automatiseren van mechanische onkruidbestrijding een grote stap vooruit zou betekenen.
Op dit moment zijn er al enkele robots op de markt die specifiek op deze taak zijn gericht. De kostprijs en beperkte flexibiliteit vormt echter vaak nog een belangrijk struikelblok, zeker voor de kleinere telers. Een multi-inzetbare robot, die naast onkruid wieden bijvoorbeeld ook kan gebruikt worden om te zaaien, bemesten en oogsten, zou soelaas bieden.” Cool weet dat landbouwers best vindingrijk zijn wat betreft tools en machines: “Ik weet dat sommige telers in de bioteelt veel zelf bouwen, of machines aanpassen aan eigen noden of taken, op maat van hun bedrijf. In Frankrijk is L’Atelier Paysan hier een mooi voorbeeld van. Ook in
Vanuit de praktijk
Het project rond de CSA-robot is al even bezig en de eerste fase is al achter de rug. Het mechanisch ontwerp, dat gestart is vanuit eenvoudige schetsen (zie foto), is zo uitgegroeid tot een heus prototype, voorzien van de nodige sensoriek en actuatoren. De vormgeving is ingesteld op de biologische beddenteelt, waarbij momenteel wordt gefocust op rode biet als proof of concept. “Rode biet is een ideaal modelgewas, enerzijds omwille van praktijkrelevantie maar ook omwille van de fysiologie en kleur, zo kan de robot goed het onderscheid zien tussen het gewas en de onkruidplanten.” Op termijn is uitbreiding naar andere gewassen zeker mogelijk. “Het principe blijft immers hetzelfde”, klinkt het.
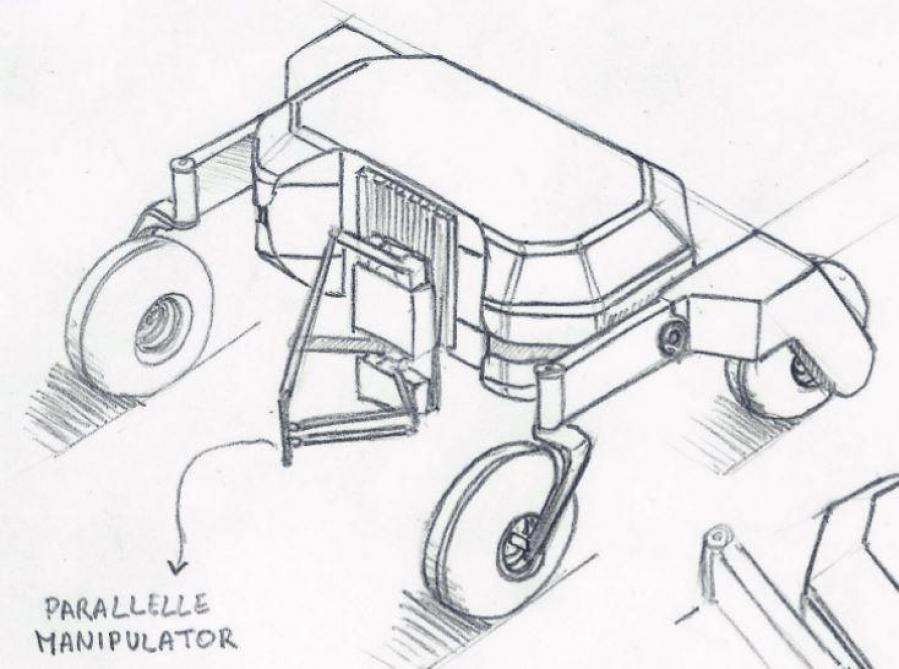

Naast de breedte van de bedden moest ook rekening worden gehouden met de hoogte van het gewas, het oneffen terrein en andere technische vereisten die werden afgetoetst met de telers. “Zo moet het gewicht van de robot minimaal zijn om bodemcompactie te reduceren en transport eenvoudig per aanhangwagen kan gebeuren, maar tegelijkertijd moet het ontwerp robuust genoeg zijn voor de ruwe veldomstandigheden. De ophanging is gebaseerd op het ontwerp van de mars rover, met een differentiële ophanging zodat de wielen zoveel mogelijk contact blijven houden met de grond. Doordat slechts twee motoren worden gebruikt voor zowel aandrijving als sturing, wordt de kost van het platform zo laag mogelijk gehouden. Daarnaast moet ook aandacht besteed worden aan gebruiksvriendelijkheid en energie-efficiëntie”, vertelt Cool.
Autonoom rijden
In een tweede fase wordt momenteel gefocust op de sturing en autonome navigatie, zodat het robotplatform zelfstandig rond kan rijden. Prof. Francis Wyffels van de UGent: “We hebben rtk-gps toegevoegd, waarmee de positie van de robot op aarde met centimeternauwkeurigheid kan

Taakspecifiek gereedschap
Data verzamelen
En de prijs?
Over de kostprijs hebben de onderzoekers nog geen zekerheid. “Het is een uitdaging om een goed evenwicht te vinden tussen kostprijs enerzijds en multi-inzetbaarheid, robuustheid, duurzaamheid en veiligheid anderzijds”, geeft hij mee. Als de oplossing door een commerciële partner wordt vermarkt, zal alles afhangen van de uiteindelijke componentkeuze en de ontwikkelingskost. “Veel hangt ook af van het gekozen businessmodel: kopen of leasen? Kant-en-klaar of bouwpakket? Dat zijn ook zaken die de prijs bepalen.”
Voor de landbouwer is rendabiliteit uiteraard belangrijk. “Op dit moment proberen we alvast naar manieren te zoeken om de kost te drukken zonder de flexibiliteit te beïnvloeden. Door te kiezen voor een tweewielaangestuurde differentiële robot worden slechts twee motoren gebruikt voor de actuatie van de robot.”, zegt Cool. “In ieder geval zal de robot niet meer mogen kosten dan de duurste machine op het bedrijf momenteel”, erkent hij. “Later in het project zullen we een meer genuanceerd beeld kunnen geven van de prijs”.
Het project loopt nog tot juli volgend jaar. “Omdat we er echt mogelijkheden in zien, willen we zeker inzetten op een vervolgtraject”, geeft de expert mee, “Op basis van de kennis die we opdoen, willen we een open ecosysteem creëren, waarbij zowel geïnteresseerde telers als constructeurs betrokken kunnen worden om op een flexibele manier robots en werktuigen op maat van kleinschalige bio-bedrijven te ontwikkelen”.





